Cacao’s body¶
Cacao’s body is the part that contains the most of robot’s hardware.
Cacao’s body components
Intel NUC
Jetson Xavier
UR3e control box
Speaker
Microphone
Power and protection system
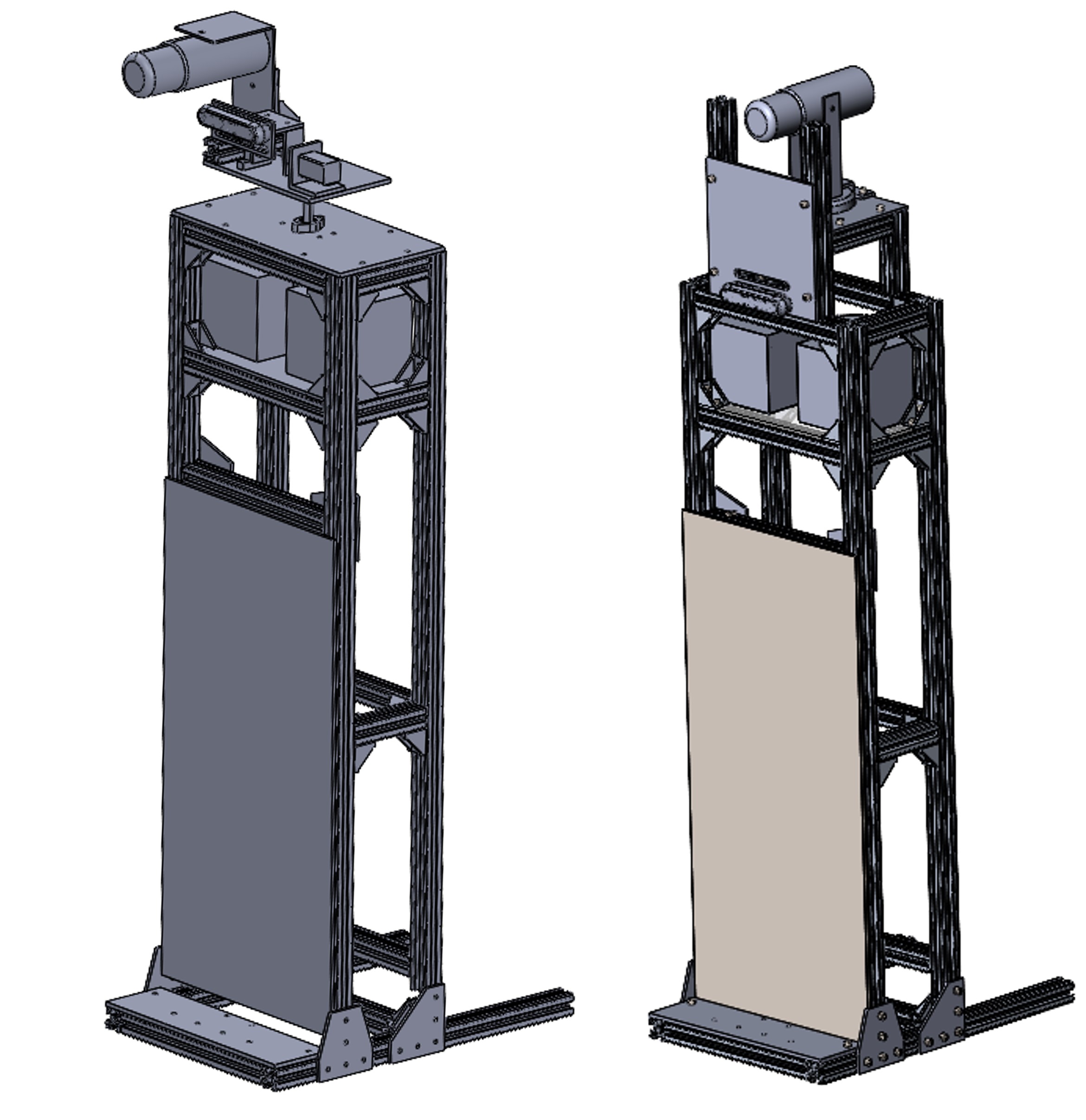
Physical Details¶
Body Dimension: xx cm x xx cm x 126 cm
Frabication Method:
Using Aluminum Frame and Bracket
Laser cut metal Sheet and acrylic
Some custom parts using 3D printer
Design Methodology¶
Easy to install and maintain
Circuit area on Cacao’s body is the main area for Software and Firmware hardware which using din rail for installation.
Core of robot’s perception
On body there are camera and microphone at the head which is a visual and sound perception. More than that there are a speakers for give a response to human.
On-going¶
Adding a Z-axis actuator
Cacao’s gripper need more workspace to operate some task. Mostly of industrial Z-axis actuator is a PLC based control which PLC is not installed in robot. Z-axis guide is considered as a harder way but able to use.
Adding 2 DoF head
To do others task, Cacao need wider visual perception. At first, we have designed a 2 DoF head having yaw angle and pitch angle but didn’t use yet.