Forward Kinematics¶
Forward Velocity Kinematics¶

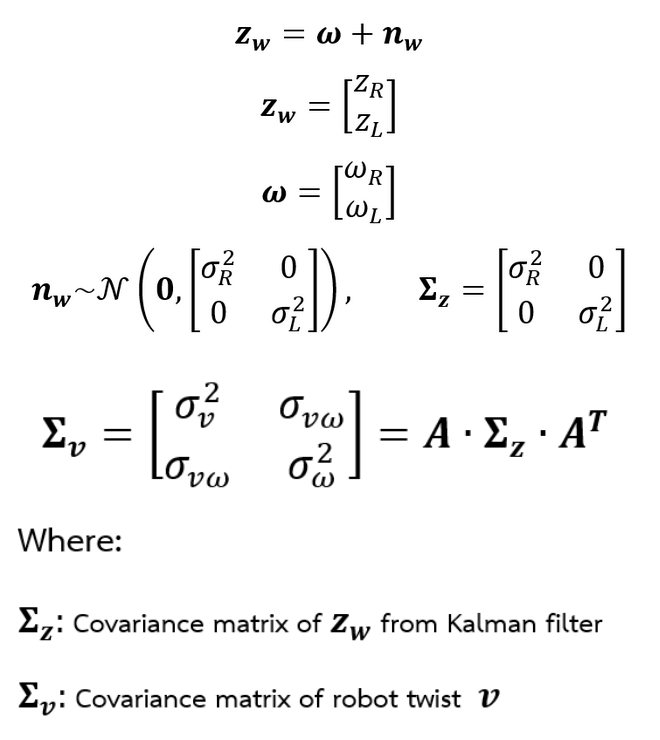
Covariance Matrix of 2D-Twist¶
Implemention (Core M7)¶
void ForwardKinematic(float right_linvel, float left_linvel, float wheel_distance)
{
Robot_LinVel = (right_linvel + left_linvel)*0.5;
Robot_AngVel = (right_linvel - left_linvel)/wheel_distance;
}
Runtime Test¶
runstarttime = micros();
//***************************************************************
ForwardKinematic(estimated_rightvel, estimated_leftvel, 0.39377);
//***************************************************************
runtime = micros() - runstarttime;
Runtime: 0.003 ms