Hardware Gripper¶
Dynamixel Selection and U2D2¶
According to the mechanical team, DYNAMIXEL MX-64R can give enough Torque to drive a gripper. DYNAMIXEL MX-64 has a function to check present position and present load. therefore, It is easy to use for implement a control algorithm

Other than DYNAMIXEL MX-64R, U2D2 is select to control and operate DYNAMIXEL with PC

Device Setup¶
In order to use the gripper, U2D2 will be connected to the USB port of the PC with the enclosed USB cable. We use a 4 Pin RS-485 connector to link up with DYNAMIXEL MX-64R and an external power supply 12V for provide power to DYNAMIXEL MX-64R

Force Sensing Resistor and Microcontroller¶

In order to use the gripper, U2D2 will be connected to the USB port of the PC with the enclosed USB cable. We use a 4 Pin RS-485 connector to link up with DYNAMIXEL MX-64R and an external power supply 12V for provide power to DYNAMIXEL MX-64R
Instead of dynamixel load, FSR402 are selected. By using voltage divider circuit,A voltage from a circuit can be used to measure a resistance from FSR402 by following a datasheet
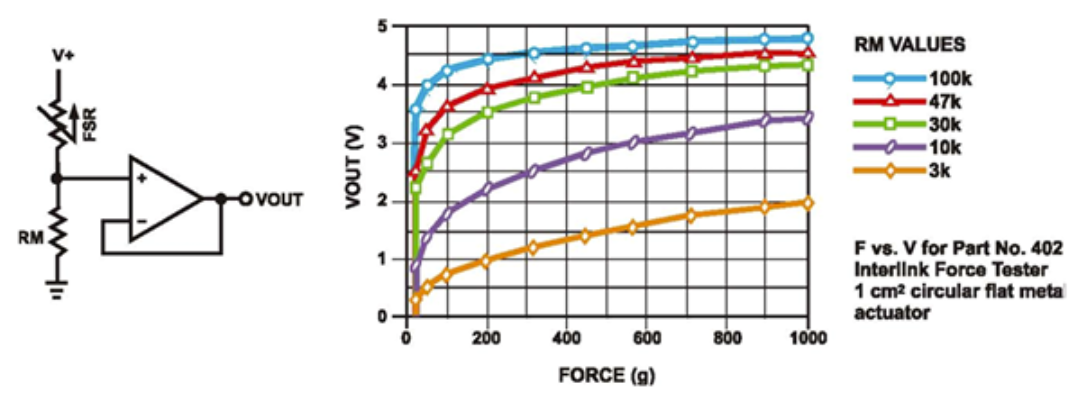
To read data from the sensor, a microcontroller is used. NUCLEO-L412KB is an appropriate microcontroller board because it has a small size and has an ADC channel for reading data.

Now our Gripper is using DYNAMIXEL present load only because it doesn’t have to pick a fragile thing.